|
|

|

|
| e-Pub |
Section: New Results
Motion planning architecture for nanosystems
Participants : Leonard Jaillet, Stephane Redon.
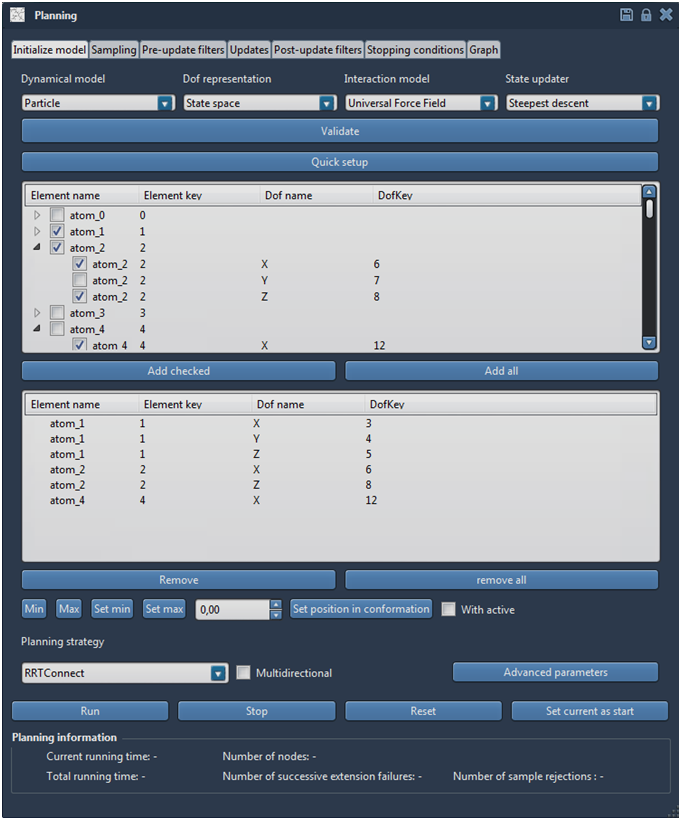
In the past, we have started the development of original quasi-static simulation methods for nano-scale systems, based on motion planning methods inspired from Robotics. In the continuity of this work, we have proposed an original Motion Planning architecture for nanosystems platform called planning. This platform offers a general framework for motion planning applied to nanosystems. In particular it includes:
-
A flexible definition of the degrees of freedom that describe the system, allowing different levels of representation (e.g. Cartesian coordinates, internal coordinates, coarse grain representation, etc.).
-
The possibility to define an arbitrary set of initial, final and intermediate states, guiding the search for a solution path.
-
The possibility to define an arbitrary set of constraints on the intermediate states of the path (e.g. geometric constraints, energy constraints, etc.)
-
Several modular functionalities specific to motion planning (e.g. conformational sampling, exploration strategy, nearest neighbor search, etc.)
-
An adapted integration within SAMSON which allows using directly all the existing force fields and state updaters present in the platform.
The planning architecture has been the base of several SAMSON modules. In particular, it led to the Planner-Explore module, which regroups many of the functionalities proposed and that can by combined together through a graphical interface. This module has in particular been used to study two complex problems:
-
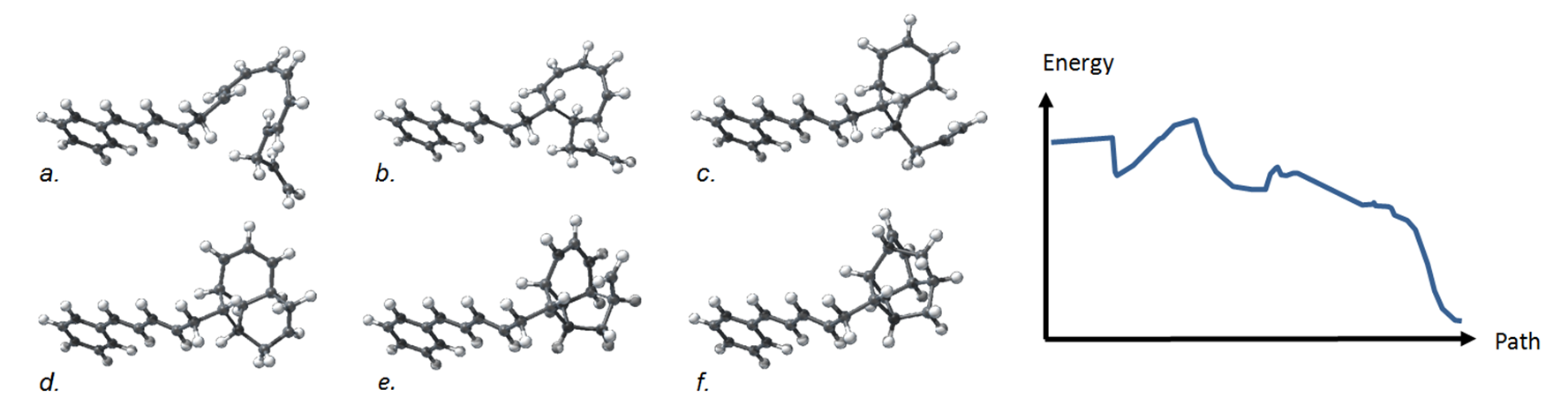
To capture the transition paths between endiandric acids (see Figure 6 ).
-
To find the global minima of Lennard-Jones clusters, for dimensions up to one hundred.